May 19, 2021
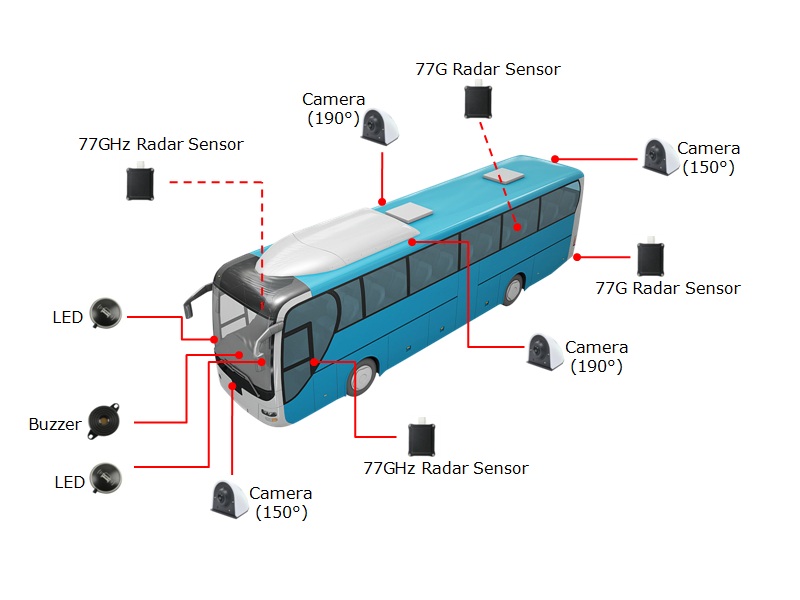
Système de détection des points aveugles tout-autour du bus
Les chauffeurs de bus sont toujours difficiles à observer clairement la situation autour du bus parce que sa longue corps. Le système de détection de points aveugles tout autour peut aider à résoudre ce problème Problème. Le système peut détecter la situation dans les taches aveugles des côtés gauche et droit du bus à travers des radars à ondes millimétriques, s'il existe d'autres véhicules entrant dans la zone détectée, outre l'alarme de la lampe à LED et l'alarme de la buzzer, le radar déclenchera la caméra associée à capturer Les conditions de la route et la sortie vidéo en temps réel sur l'écran d'affichage de bus comme bien. Selon ces Alarmes et vidéo en temps réel, le pilote de bus peut ajuster le comportement de conduite à l'avance pour réduire l'accident de la circulation quand conduire. Avantages: Travailler tous les temps, y compris la journée de pluie, la journée enneigée, la journée brumeuse, la nuit, etc.disponible pour une mauvaise vision Environnement (dans faible ou fort lumière). Convient pour la route basse et haute vitesse Conditions. Spécifications: configuration du système 4 capteur radar +2 lampes à LED +1 avertisseur sonore la norme ISO17387 précision de la plage de détection ± 0,65m (typique) Plage de détection maximaleVéhicule (0.3m ~ 50m ) moto (0.3m ~ 30m ) Piéton (0.3m ~ 15m ) radiofréquence frontale fin (rffe) 2TX 4RX antenne angle horizontal pour chaque capteur radar 120 ° antenne Angle vertical pour chaque capteur radar 30 ° Temps de réponse 50ms Taux d'identification de vitesse ± 0,25m / S L'antenne transmet la puissance de sortie 12dBM Précision d'alarme système Véhicule ≥ 95% Moto ≥ 95% Piétonne ≥ 95% type d'alarme Type 1: LED lampe Type 2: LED lampe clignote + Beeps Buzzer niveau imperméable IP67 consommation de courant ≤ 1100MA @ 12VDC Voltage de fonctionnement 9 ~ 16VDC (typique DC 12V) Température de fonctionnement -40 ℃ ~ 85 ℃ température de stockage -40 ℃ ~ 95 ℃ Fréquence d'opération 77 ~ 81 GHz Fonctions: Quand Il y a des obstacles détectés dans différentes zones, le système déclenchera une caméra liée pour capturer la vue de la zone et afficher la vidéo en temps réel dans l'écran de bus Écran. Pendant ce temps, le système mettra en garde le conducteur avec la lampe à LED et Buzzer. I. Spot Blind Détection (BSD) Quand Il y a des obstacles détectés par le capteur radar dans BSD Surface, le système mettra en garde le conducteur comme Suivre: L'obstacle est détecté à gauche Zone: 1) lampe LED sur; Si le signal gauche est activé, la lampe LED gauche clignote et bip bip ; 2) Vue de face et caméra de la vue de la vue de la vue, l'image de vue de la vue avant et l'image de vue de gauche seront affichées sur l'écran du bus Écran. L'obstacle est détecté dans la droite Zone: 1) lampe LED sur; Si le signal de virage à droite est allumé, la lampe à LED droite clignote et bip sonore ; 2) Vue de face et la caméra de la vue de la vue de droite, l'image de la vue de la vue et la vue de droite sera affichée sur l'écran de ...
Voir plus




 Réseau IPv6 pris en charge
Réseau IPv6 pris en charge